Author: ELECTRONOOBS
03/12/2018
As seen in previous post
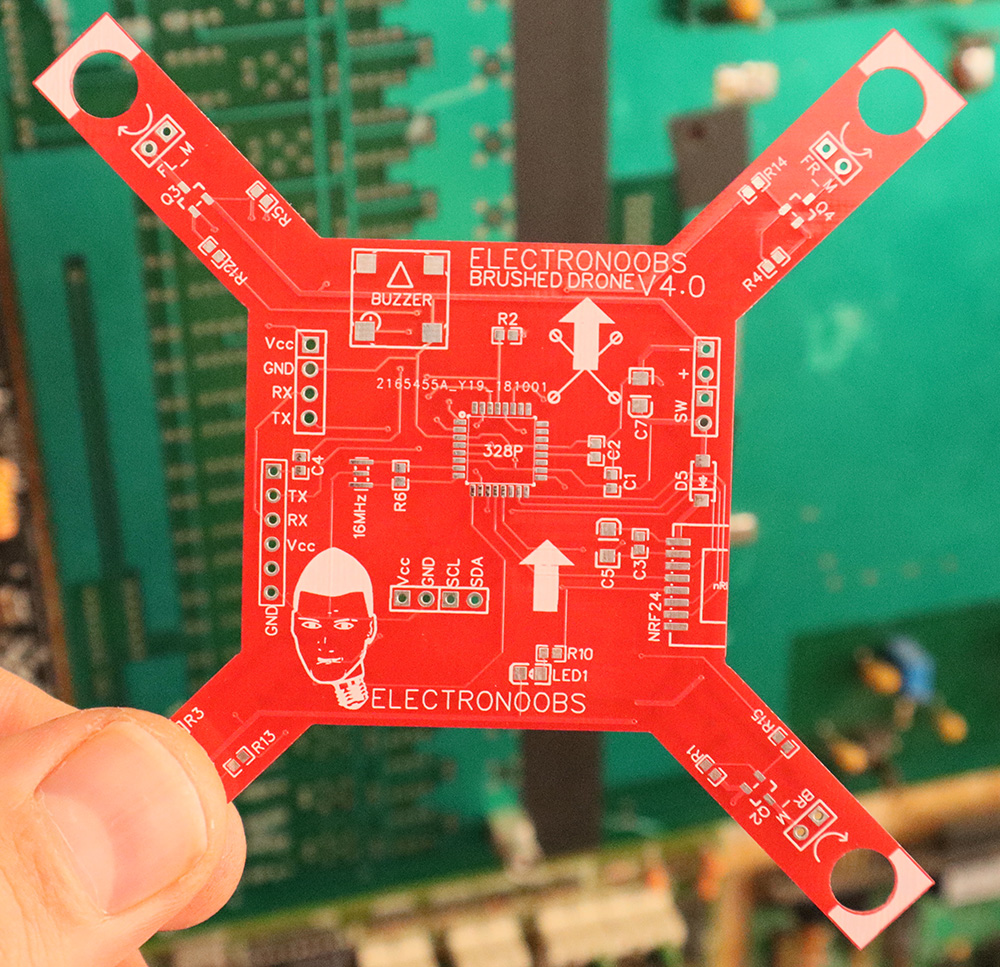
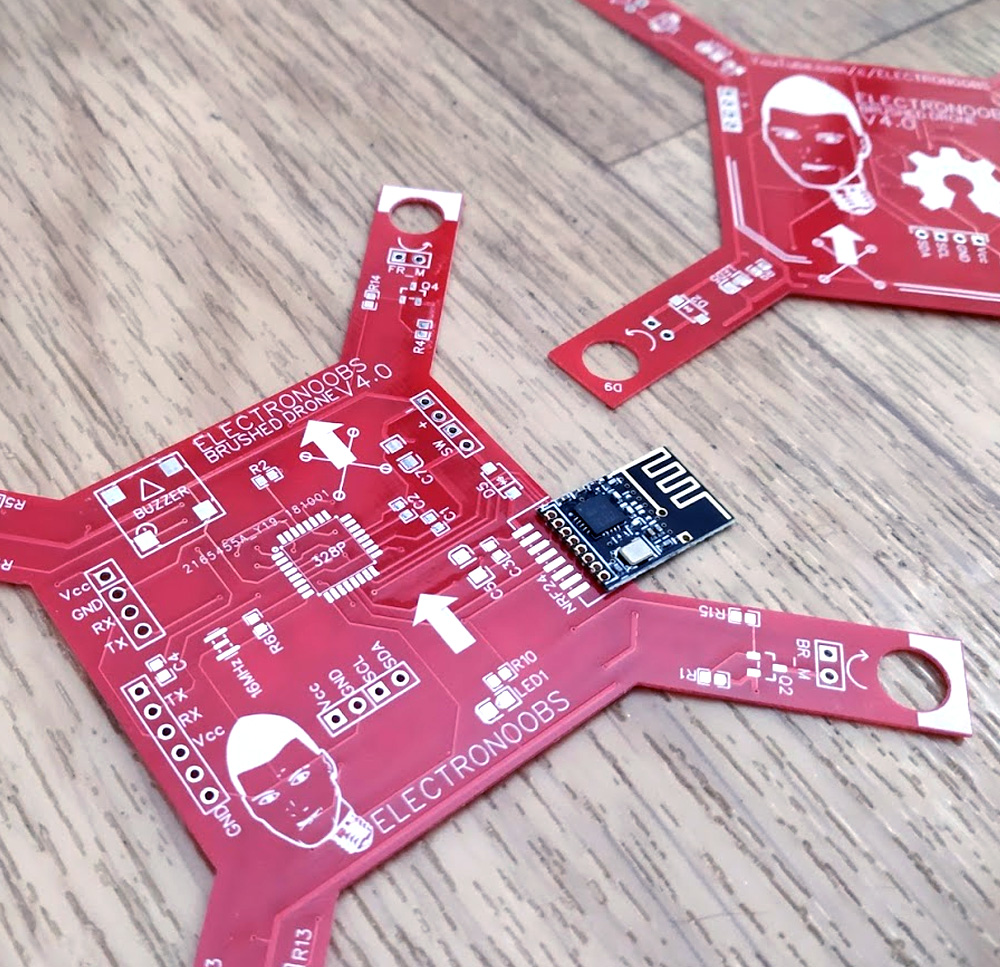
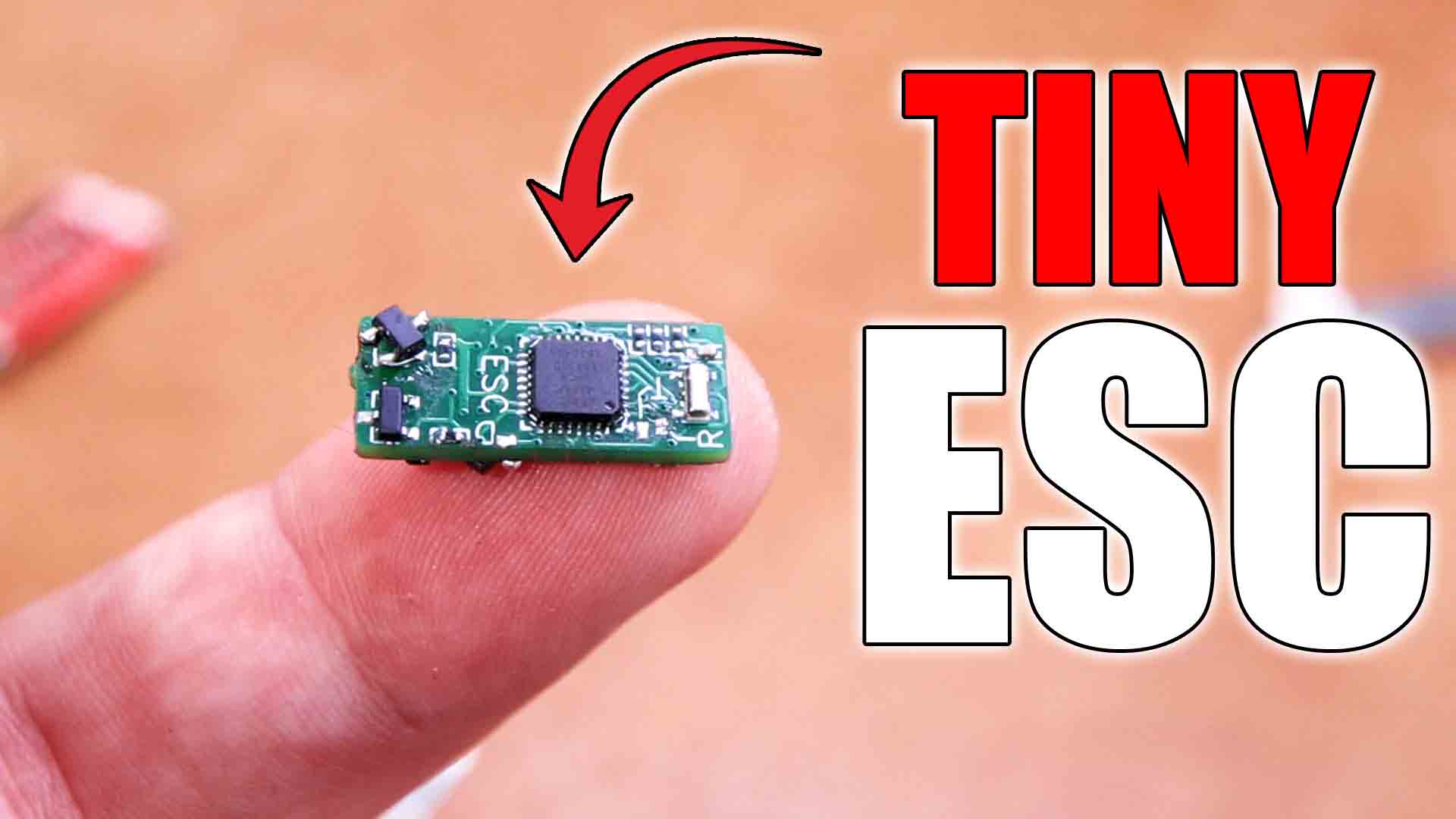
like this one here, I'm working on a brushed mini drone, meaning the drone will be small and work with coreless brushed drone. Usually, dornes have brushless motors due to their high speeds and performance. But those are quite expensive. That's why I'm working on a low cost drone that can be made and programed in Arduinom IDE.
Before the official tutorial post here are some of the enw features of this board that are different from the other versions. I really hope this one will perform better and get us a good flight.
To order your boards, use
JLCPCB.com and select your color.






 See other blog→
See other blog→