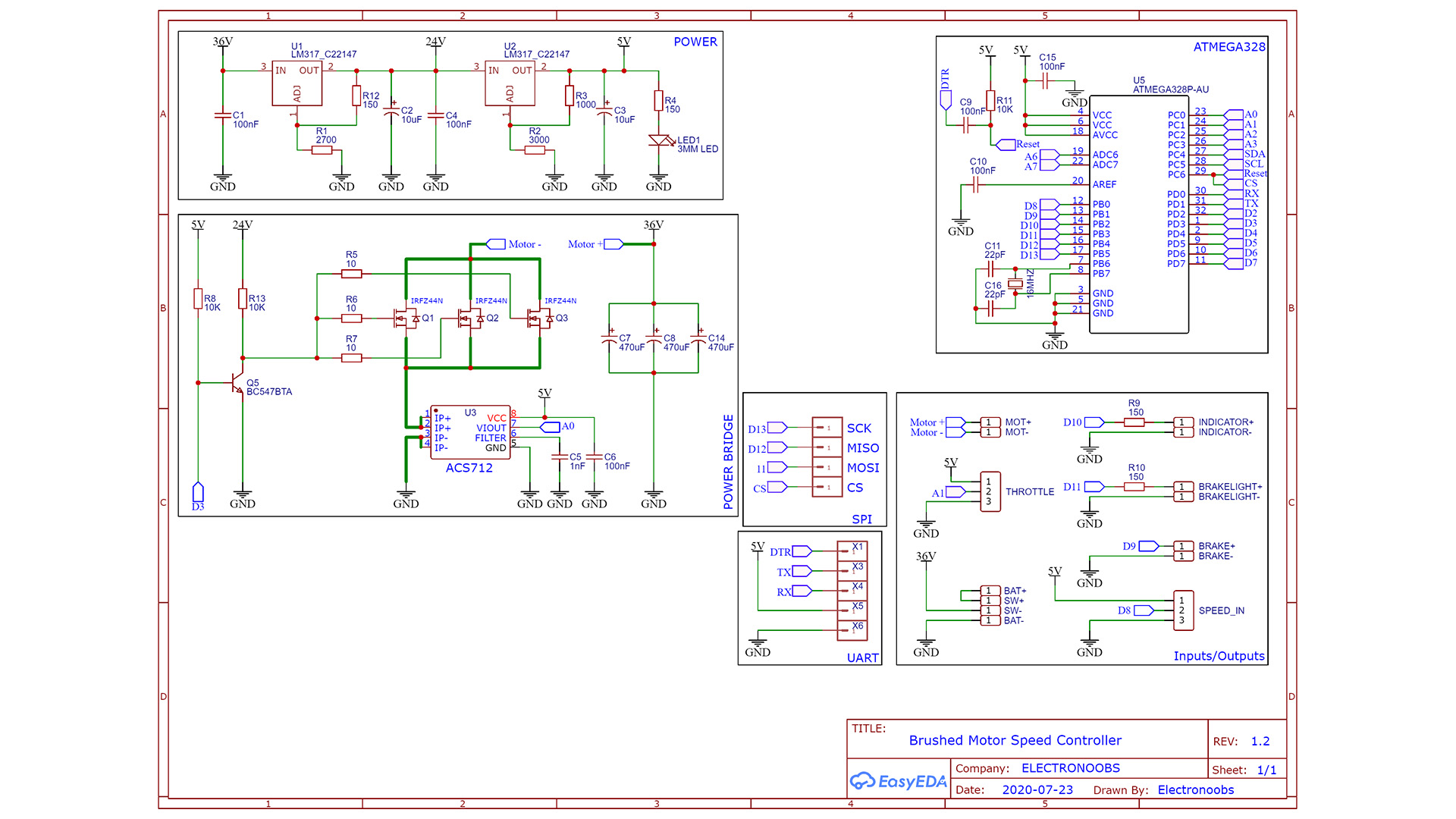
This version of the code has minimum speed detection but it doesn't have speed limit yet. It has only current limit with the feedback from the ACS712. The code starts with the BJT turned ON so we have GND at the MSOFETs gate so those would be OFF. Then, according to the throttle pot, we increase the PWM signal, which is inverter, 255 to 0 instead of 0 to 255, because the BJT acts as an inverter. We only activate the PWM signal if the speed is higher than a certain value and throttle is in the lowest position. We do this for saferty. We don't want the motor to start from 0, that will put it into humming mode and draw so much current it could burn the circuit. So, first, the user should pedal a bit and then accelerate. Read more in the code.
You can download the code from below or just copy+paste it from below as well.
/*E-bike Arduino Brushed DC motor electronic speed controller
Tutorial: https://electronoobs.com/eng_arduino_tut126.php
Schematic: https://electronoobs.com/eng_arduino_tut126_sch1.php
Code: https://electronoobs.com/eng_arduino_tut126_code1.php
Gerbers: https://electronoobs.com/eng_arduino_tut126_gerber1.php
Video: https://www.youtube.com/watch?v=GtXMHM78Xbo
Current limit: I'm using the 20A ACS712 so the multiplier is 0.100V. Change that
below if you use a differen one. Then change your current limit if you want.
RPM limit: I'm assuming the wheel has a magnet and a hall sensor. That means one
pulse per rotation. In my case I've place limit of RMPs to 20, that means 20 wheel
rotations per minute. If you have a different sensor that would create more than one
pulse per rotation, change that value. For example: If your sensor creates 5 pulses
each rptation, you should set rpm_limit to 5*20 = 100 if you want 20 rotation limit
PWM pulse: The pwm is invertet because we use a NPN BJT at the MOSFET gate with a pullup.
If you change the scheamtic to a PNP and a pulldown, just go below and where you see
analogWrite(PWM, 255 - pwm_value); just change that to analogWrite(PWM, pwm_value);
That would invert the PWM signal
*/
///////////////////////////////////////EDITABLE VALUES/////////////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////////
float current_limit = 7.0; //Current limit in Ampers
int rpm_limit = 20; //RPM limit before enabling the motor. User must push a bit the bike before throttle
int Delay = 1; //loop delay in ms
float multiplier = 0.100; //Sensibility in Volts/Ampers for the 20A ACS712 model (100mV)
///////////////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////////
//Inputs/Outputs
int throttle_in = A1; //Throttle potentiometer (0V - 5V)
int current_in = A0; //From ACS712 IC
int speed_in = 8; //From wheel hall sensor
int break_in = 9; //From break switch
int breaklight = 11; //To the break light LEDs
int indicator = 10; //A small indicator LED (shows when contorller is ready)
int PWM = 3; //Connected to the BJT base
//Variables
unsigned long previousMillis = 0; //Counter used for loop delay
int pwm_value = 0;
bool power_enable = false;
unsigned long previous_count, current_count;
byte pulse_state;
int one_rotation_time = 0;
void setup() {
pinMode(throttle_in,INPUT);
pinMode(current_in,INPUT);
pinMode(speed_in,INPUT);
pinMode(break_in,INPUT_PULLUP);
pinMode(breaklight,OUTPUT);
pinMode(indicator,OUTPUT);
pinMode(PWM,OUTPUT);
digitalWrite(breaklight,LOW);
digitalWrite(indicator,LOW);
//Set D8 (speed_in) to trigger interrupt (we use this to read RPMs)
PCICR |= (1 << PCIE0); //enable PCMSK0 scan
PCMSK0 |= (1 << PCINT0); //Set pin D8 trigger an interrupt on state change.
TCCR2B = TCCR2B & B11111000 | B00000010; // Set D3 PWM frequency to 3921.16 Hz
digitalWrite(PWM,HIGH); // We set it HIGH, so the BJT is on and we have
// GND at the MSOFET gate (so, MOSFET OFF)
}
void loop() {
unsigned long currentMillis = millis();
if(currentMillis - previousMillis >= Delay){
previousMillis += Delay; //Increase loop delay by "Delay" value
float rpm = 60000.0 / one_rotation_time; //rotations in one minute (60.000 ms)
if(break_in){ //Only run the loop if break_in is HIGH (it has pullup)
digitalWrite(breaklight,LOW); //Turn off breaklight
int pwm_setpoint = map(analogRead(throttle_in),0,1023,0,255); //Read setpoint for throttle
if(rpm > rpm_limit && pwm_setpoint < 5){ //We enable power only if RPM is high and throttle low
power_enable = true;
digitalWrite(indicator,HIGH); //We indicate that we can increase throttle
}
if(rpm < rpm_limit){ //When RPM is low, we disable power for safety
power_enable = false;
digitalWrite(indicator,LOW); //We can't increase throttle
}
if(pwm_setpoint > 5){ //Only start increasing after pwm_setpoint higher than 5
float SensorRead = analogRead(current_in)*(5.0 / 1023.0); //We read the sensor output
float Current = (SensorRead-2.5)/multiplier; //Calculate the current value
if(pwm_setpoint > pwm_value){ //Increase PWM (by throttle read)
pwm_value = pwm_value + 1;
if(pwm_value > 255){
pwm_value = 255;
}
}
else if(pwm_setpoint < pwm_value){ //Decrease PWM (by throttle read)
pwm_value = pwm_value - 1;
if(pwm_value < 0){
pwm_value = 0;
}
}
if(Current > current_limit){ //Decrease PWM (by current limit)
pwm_value = pwm_value - 1;
if(pwm_value < 0){
pwm_value = 0;
}
}
if(power_enable){
analogWrite(PWM, 255 - pwm_value);
}
}//End if "pwm_setpoint > 5"
else{
pwm_value = 0;
analogWrite(PWM, 255 - pwm_value);
}//End else "pwm_setpoint > 5"
}//end if break in
else{ //break_in is low so user pressed break
pwm_value = 0;
analogWrite(PWM, 255 - pwm_value);
digitalWrite(breaklight,HIGH);
}//end of else "break in"
}//end loop "if currentMillis"
}//end "void loop"
/*This is the interruption routine on pin change
in this case for digital pin D8 which is the Speed_in input
We asume taht the Hall sensor circuit will give a HIGH pulse each time
the magnet passes in front of it and that means one more rotation...
*/
ISR(PCINT0_vect){
//First we take the current count value in milli seconds using the millis() function
current_count = millis();
///////////////////////////////////////
if(PINB & B00000001){ //We make an AND with the pin state register, We verify if pin 8 is HIGH???
if(pulse_state == 0){ //If the last state was 0, then we have a state change...
pulse_state = 1; //Store the current state into the last state for the next loop
one_rotation_time = current_count - previous_count; //We make the time difference. Rotation_time is current_time - previous_count in milli-seconds.
previous_count = current_count; //Set counter_1 to current value for next loop.
}
}
else if(pulse_state == 1){ //If pin 8 is LOW and the last state was HIGH then we have a state change
pulse_state = 0; //Store the current state into the last state for the next loop
}
}