 Sobre nosotros
Sobre nosotros  Historia
Historia  A estudiar
A estudiar  Contacto
Contacto  Arduino
Arduino  Circuitos
Circuitos Robótica
Robótica  Modulos
Modulos  Materiales
Materiales  Impresoras
Impresoras  Objetos 3D
Objetos 3D  Edición 3D básica
Edición 3D básica  Noticias
Noticias  Gadgets
Gadgets  Preguntas
Preguntas Sabias que?
Sabias que? ESC - control electrónico de velocidad



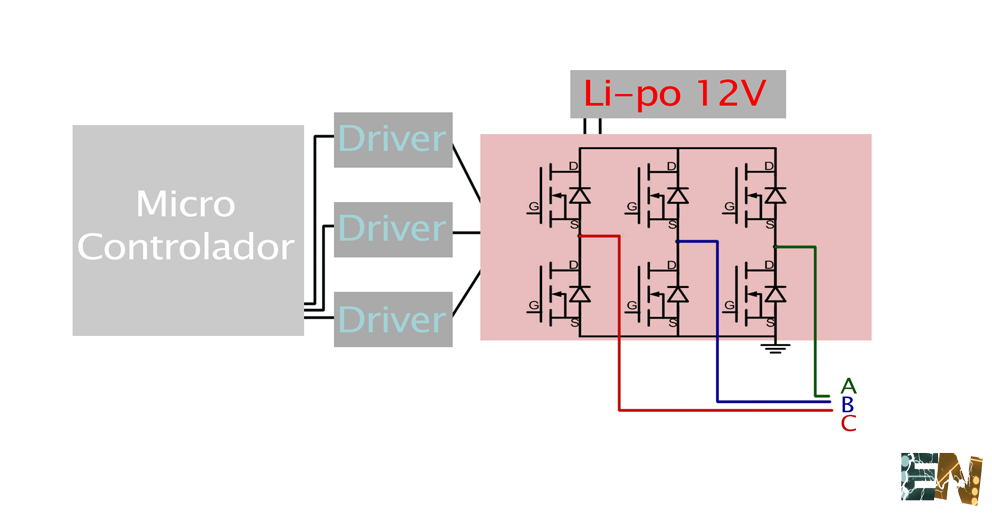
Esquemático puente trifásico!
Primero un poco de teoría
Observamos el esquema general de un controlador electrónico de velocidad y lo dividiremos en tres partes. Primero de todo necesitamos un microcontrolador que hará la parte de procesado. El microcontrolador procesa los datos y decidirá la señal que enviara al siguiente apartado, los drivers, la función de estos será aplicar la tensión necesaria en las puertas de los transistores del tercer apartado e abrir o cerrar el paso de corriente a través de dichos transistores. Finalmente el tercer apartado lleva el nombre de puente trifásico. Tenemos que alimentar un motor trifásico siguiendo una cierta secuencia de los sentidos que tomara la corriente a través de las bobinas del motor. Abriendo y cerrando los 6 transistores de una manera muy precisa se logra tener la secuencia deseada para realizar el giro del motor.
Como ya hemos mencionado el esquema es muy general. Para tener la velocidad del motor sincronizada con la secuencia que realiza el puente trifásico necesitaremos controlar en todo momento la posición del motor y comparar dicha posición con la deseada por el microcontrolador. Para realizar este apartado se hará lo siguiente, medir la EMF o el campo electromagnético creado por el giro del motor. Igual que una dinamo los imanes crearan una cierta fuerza sobre las bobinas del motor. Medir la tensión que cae en los terminales del motor podremos hacer un fino procesado y saber en qué posición se encuentra el motor y sincronizar su giro.
Giro del motor con mas detalle:
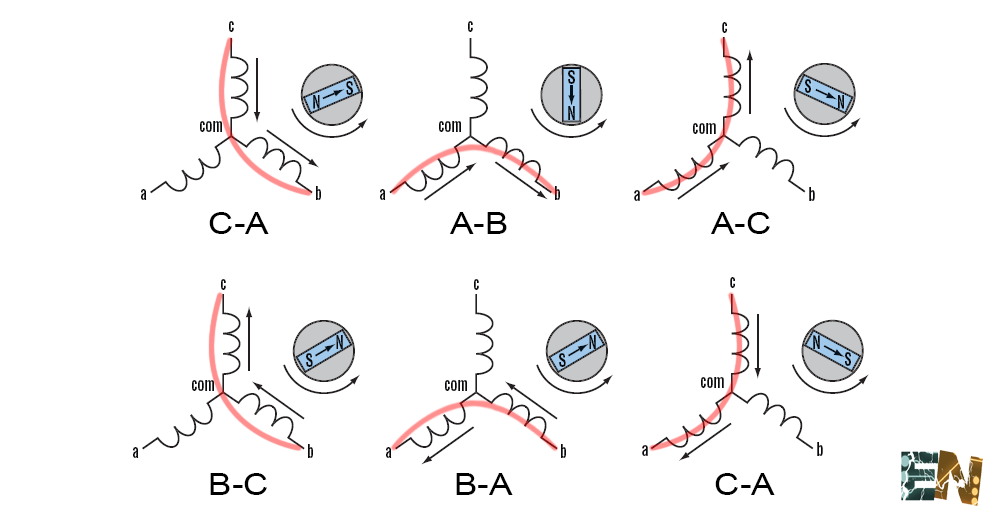
Para entender mejor el funcionamiento interno de un motor brushless trifásico nos fijamos en la figura de arriba.Sabemos que el motor internamente tiene un número múltiplo de 3 de bobinas. Las bobinas están distribuidas de una forma equidistante alrededor del perímetro del motor. De esta manera entre cada bobina el eje girara 360 grados dividido por el número de bobinas. En nuestro caso el motor es de 12 bobinas, 4 bobinas para cada una de las 3 entradas. En la figura dearriba estas bobinas están representadas por solo una para cada entrada. La parte móvil del motor puede ser exterior o interior a las bobinas, en este caso es exterior. Alrededor de la parte móvil están distribuidos de la misma manera que las bobinas con el mismo espaciado 12 imanes muy fuertes. Sabemos que al pasar corriente por las bobinas se creara un campo magnético con sentido dependiendo del sentido de la corriente. Alternando los sentidos de la corriente a través de las bobinas alternamos las polaridades de los campos eléctricos creados y de esta manera tendremos polos opuestos entre las bobinas y los imanes en ciertos momentos deseados. Mirando la figura observamos que empezamos conmutando la puerta superior de la entrada C y la puerta inferior de la entrada A. De esta manera hacemos correr corriente desde C a A creando un campo magnético a través de estas dos bobinas. Dicho campo al estar opuesto al campo de los imanes moverá el eje un intervalo adelante (360/12 grados). Justo en el momento en que las bobinas pasan por el medio del imán siguiente tenemos que conmutar al siguiente estado que es introducir corriente de A a B y así para adelante creando un bucle infinito que se repite cada 6 estados.
Como detectar el BEMF y sincronisar nuestra secuencia:
Sabemos que un imán crea un campo magnético a su alrededor. Una vez se pone una bobina delante suyo, el movimiento cambiara el flujo del campo a través de la bobina. En cuanto más flujo atraviesa la bonina más intensidad pasará por el bobinado y más tensión puede caer en los terminales. A continuación nos fijamos en un ejemplo de detección del BEMF en las figuras :
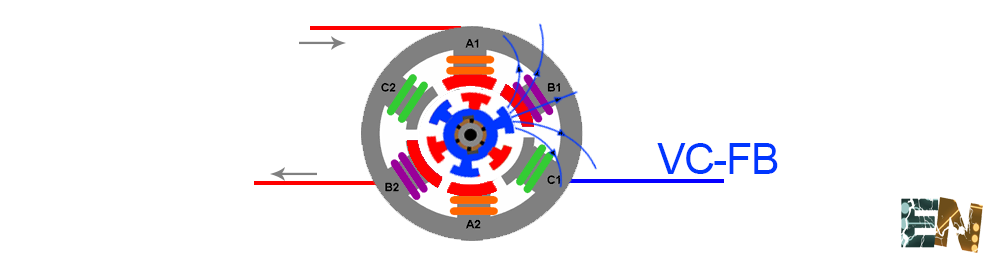
Observamos en la figura que se ha activado la puerta superior de la salida A y la inferior de la salida B, de esta manera tenemos una corriente que circula por las bobinas A y be en el sentido mostrado en la figura. Tendremos por lo tanto un campo magnético igual en A que en B ya que el bobinado es opuesto en las dos entradas. Dicho campo al ser opuesto al campo creado por los imanes, empuja el eje a girar en el sentido de las agujas del reloj. Llamaremos al color azul polarización norte y al rojo polarización sur. Nos fijamos en el imán azul. Sus líneas de campo salen hacia el exterior. Por la bobina C de momento dichas línea de campo no llegar a atravesar.
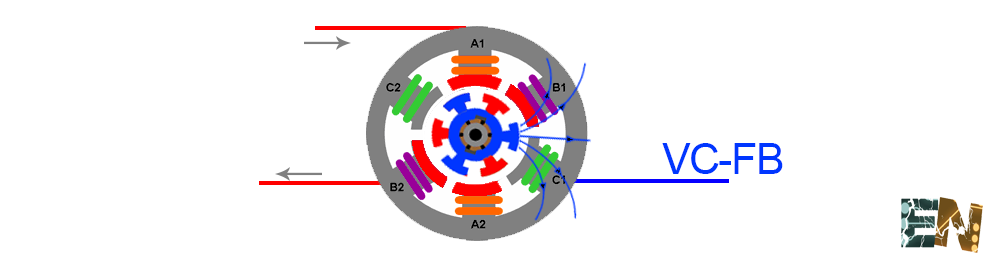
En la siguiente figura después de unos instantes se observa que ya empiezan a atravesar la bobina C líneas del campo creado por el imán. Por lo tanto una corriente circulara por el bobinado y se empieza a ver afectado el potencial detectado en VC-FB tal como se ha explicado anteriormente. A medida que el campo creado por el imán es cada vez más perpendicular a la bobina C, el flujo será cada vez mayor.
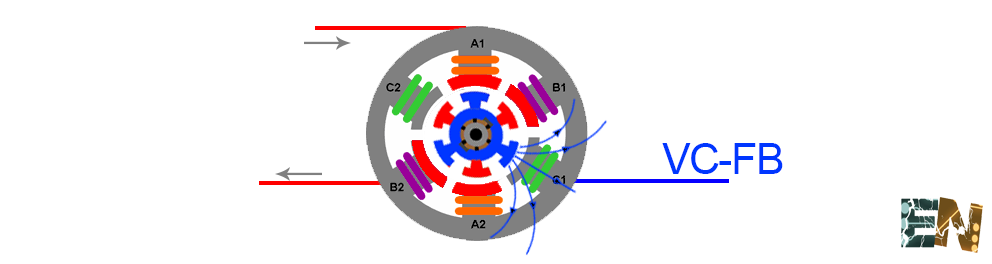
En la siguiente figura observamos que el imán del eje está completamente enfrentado a la bobina C. Eso quiere decir que el flujo es máximo por lo tanto la intensidad que atraviesa el bobinado será máximo. Es justamente ese instante en que la polarización de las bobonas debe cambiar. Ser capaz de detectar ese instante significa ser capaz de perfectamente cambiar de estado. Ya que tenemos una salida en tensión en función de la posición del rotor dicho cambio sincronizado de estado será posible.
Empezamos
Ya sabemos que debemos hacer. Necesitamos montar el puente trifásico, conectar un microcontrolador que lea las salidas de BEMF del motor y cree una secuencia para alternar las entradas al motor. Primero de todo creamos un esquematico en el programa Design Spark. Se puede utilizar cualquier otro programa de diseño de PCB. Para hacer el esquemático importamos todos los componentes necesarios especificados al principio del tutorial. Hacemos las conexiones y pasamos al PCB.