Below you can download the code. You will need the libraries for the LCD, the ADS1115 and the MCP4725 modules and you can download those libraries from below. You will also need the BusIO library so install that with the library manager of Arduino IDE. Read the code for more details, especially the multiplier part. Compile and upload and then test the controller. You can get the code from below in a .zip file or go even lower and copy+paste the code.
The code should use a PID control for better results, but the ADC read and DAC write are slowing the code so much, that a good PID was not working. So, instead of PID I've made a "manual control" and I decide the proportional value dependind on the error range. More in the code...
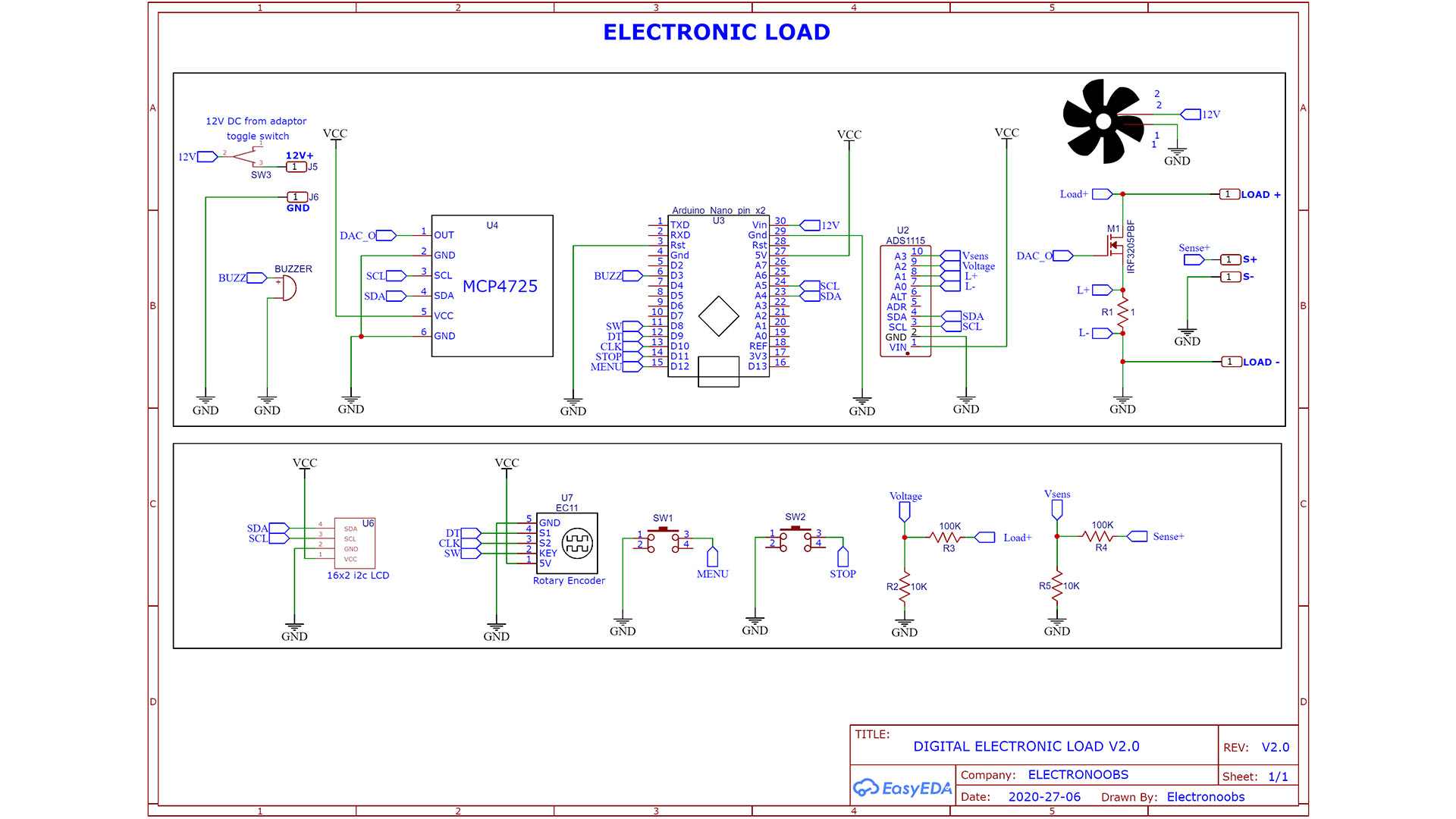
This part is important. You see, when you sue the ADS1115, to pass from bit values (0 to 65000), we use a multiplier. By default that is "0.185mv" or "0.000185V". In the code, to measure current, we make a differential measurement of the voltage on the "1ohm" load. Since the load is 1ohm, that will give us DIRECTLY the current value since "I = V/R" and R is 1. BUT!!! The resistor is not exactly 1ohm, so in my case I've adapted the multiplier to 0.0001827. You might need to adjust this variable to other values till you get good readings, so while measuring the value with an external multimeter at the same time, adjust this variable till you get good results.
The same goes here. But in this case, the voltage read is from a voltage divider. You see, the ADS1115 can only measure up to 5V. If the input is higer it will get damaged. So, for that btween the ADS1115 and the main input I've used a 10K and 100K divider and that will equal to a divider of 0.0909090. So, now the multiplier is 0.000185 / 0.0909090 = 0.002035. Now these resistor values are not perfect neighter so we don't have exactly 10K and 100K, that's why my multiplier for voltage read is 0.0020645. Just do the same, measure the voltage on the LCD screen and also with an external multimiter and adjust this value till you get good results. I've measure the resistors but that's not enough. We need precise values.
/////////////////////////////Library for i2c LCD//////////////////////////////////
#include <Wire.h>
#include <LiquidCrystal_I2C.h> //Download it here: https://www.electronoobs.com/eng_arduino_liq_crystal.php
LiquidCrystal_I2C lcd(0x3f,16,2); //slave address sometimes can be 0x3f or 0x27. Try both!
uint8_t arrow[8] = {0x0, 0x4 ,0x6, 0x3f, 0x6, 0x4, 0x0};
uint8_t ohm[8] = {0xE ,0x11, 0x11, 0x11, 0xA, 0xA, 0x1B};
uint8_t up[8] = {0x0 ,0x0, 0x4, 0xE , 0x1F, 0x4, 0x1C, 0x0};
/////////////////////////////Library for ADS1115 ADC//////////////////////////////////
#include <Adafruit_ADS1015.h> //Download here: https://www.electronoobs.com/eng_arduino_Adafruit_ADS1015.php
Adafruit_ADS1115 ads(0x48); //Define i2c address
#define ADS1115_CONVERSIONDELAY (1)
#define ADS1015_CONVERSIONDELAY (1)
/////////////////////////////Library for MCP4725 DAC//////////////////////////////////
#include <Adafruit_MCP4725.h> //Download here: https://www.electronoobs.com/eng_arduino_Adafruit_MCP4725.php
//You need BusIO library as well //install it with Arduino library manager if you don't have it
Adafruit_MCP4725 dac;
// Set this value to 9, 8, 7, 6 or 5 to adjust the resolution
#define DAC_RESOLUTION (9) //DAC resolution 12BIT: 0 to 4056
//////////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////INPUTS/OUTPUTS/////////////////////////////////////
int SW = 8; //push button from encoder
int SW_red = 11; //(in my case) red push button for stop/resume
int SW_blue = 12; //(in my case) blue push button for menu
int Buzzer = 3; //Buzzer connected on pin D3
//////////////////////////////////////////////////////////////////////////////////////
int Delay = 300; //This is the LCD refresh rate. Each 300ms.
unsigned long previousMillis = 0; //Variables used for LCD refresh loop
unsigned long currentMillis = 0; //Variables used for LCD refresh loop
int Rotary_counter = 0; //Variable used to store the encoder position
int Rotary_counter_prev = 0; //Variable used to store the previous value of encoder
bool clk_State; //State of the CLK pin from encoder (HIGH or LOW)
bool Last_State; //Last state of CLK pin from encoder (HIGH or LOW)
bool dt_State; //State of the DT pin from encoder (HIGH or LOW)
int Menu_level = 1; //Menu is strucured by levels
int Menu_row = 1; //Each level could have different rows
int push_count_ON = 0; //Variable sued as counter to detect when a button is really pushed (debaunce)
int push_count_OFF = 0; //Variable sued as counter to detect when a button is NOT pushed (debaunce)
String space_string = "______"; //used to print a line on LCD
String space_string_mA = "____"; //used to print a line on LCD
String pause_string = ""; //used to print something on LCD
bool SW_STATUS = false; //Store the status of the rotary encoder push button (pressed or not)
bool SW_red_status = false; //Store the status of the pause/resume button (pressed or not)
bool pause = false; //store the status of pasue (enabeled or disabled)
//Variables for storing each decimal for current, resistance and power.
byte Ohms_0 = 0;
byte Ohms_1 = 0;
byte Ohms_2 = 0;
byte Ohms_3 = 0;
byte Ohms_4 = 0;
byte Ohms_5 = 0;
byte Ohms_6 = 0;
byte mA_0 = 0;
byte mA_1 = 0;
byte mA_2 = 0;
byte mA_3 = 0;
byte mW_0 = 0;
byte mW_1 = 0;
byte mW_2 = 0;
byte mW_3 = 0;
byte mW_4 = 0;
//Variables for ADC readings
float ohm_setpoint = 0;
float mA_setpoint = 0;
float mW_setpoint = 0;
int dac_value = 0;
/////////////////////////////////////////////////////////////IMPORTANT//////////////////////////////////////////////////////////////////
/*This part is important. You see, when you sue the ADS1115, to pass from bit values (0 to 65000), we use a multiplier
By default that is "0.185mv" or "0.000185V". In the code, to measure current, we make a differential measurement of the voltage
on the "1ohm" load. Since the load is 1ohm, that will give us DIRECTLY the current value since "I = V/R" and R is 1.
BUT!!! The resistor is not exactly 1ohm, so in my case I've adapted the multiplier to 0.0001827. You might need to adjust this
variable to other values till you get good readings, so while measuring the value with an external multimeter at the same time,
adjust this variable till you get good results. */
const float multiplier = 0.0001827; //Multiplier used for "current" read between ADC0 and ADC1 of the ADS1115
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
/*The same goes here. But in this case, the voltage read is from a voltage divider. You see, the ADS1115 can only measure up to 5V.
If the input is higer it will get damaged. So, for that btween the ADS1115 and the main input I've used a 10K and 100K divider and
that will equal to a divider of 0.0909090. So, now the multiplier is 0.000185 / 0.0909090 = 0.002035
Now these resistor values are not perfect neighter so we don't have exactly 10K and 100K, that's why my multiplier for voltage read
is 0.0020645. Just do the same, measure the voltage on the LCD screen and also with an external multimiter and adjust this value till you get
good results. I've measure the resistors but that's not enough. We need precise values. */
const float multiplier_A2 = 0.0020645; //Multiplier for voltage read from the 10K/100K divider
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
void setup() {
lcd.init(); //Start i2c communication with the LCD
lcd.backlight(); //Activate backlight
lcd.createChar(0, arrow); //create the arrow character
lcd.createChar(1, ohm); //create the ohm character
lcd.createChar(2, up); //create the up arrow character
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" ELECTRONOOBS ");
tone(Buzzer, 500, 100);
delay(100);
tone(Buzzer, 700, 100);
delay(100);
tone(Buzzer, 1200, 100);
delay(300);
lcd.setCursor(0,1);
lcd.print("ELECTRONIC LOAD");
delay(2000);
PCICR |= (1 << PCIE0); //enable PCMSK0 scan
//PCMSK0 |= (1 << PCINT0); //Set pin D8 trigger an interrupt on state change.
PCMSK0 |= (1 << PCINT1); //Pin 9 (DT) interrupt. Set pin D9 to trigger an interrupt on state change.
PCMSK0 |= (1 << PCINT2); //Pin 10 (CLK) interrupt. Set pin D10 to trigger an interrupt on state change.
DDRB &= B11111001; //Pins 8, 9, 10 as input
pinMode(Buzzer,OUTPUT); //Buzzer pin set as OUTPUT
digitalWrite(Buzzer, LOW); //Buzzer turned OFF
pinMode(SW,INPUT_PULLUP); //Encoder button set as input with pullup
pinMode(SW_blue,INPUT_PULLUP); //Menu button set as input with pullup
pinMode(SW_red,INPUT_PULLUP); //Stop/resume button set as input with pullup
delay(10);
ads.begin(); //Start i2c communication with the ADC
ads.startComparator_SingleEnded(2, ADS1015_REG_CONFIG_MODE_CONTIN);
ads.startComparator_SingleEnded(3, ADS1015_REG_CONFIG_MODE_CONTIN);
delay(10);
dac.begin(0x60); //Start i2c communication with the DAC (slave address sometimes can be 0x60, 0x61 or 0x62)
delay(10);
dac.setVoltage(0, false); //Set DAC voltage output ot 0V (MOSFET turned off)
delay(10);
previousMillis = millis();
}
void loop() {
if(!digitalRead(SW_red) && !SW_red_status){
push_count_OFF+=1;
if(push_count_OFF > 10){
tone(Buzzer, 1000, 300);
pause = !pause;
SW_red_status = true;
push_count_OFF=0;
}
}
if(digitalRead(SW_red) && SW_red_status){
SW_red_status = false;
}
if(Menu_level == 1)
{
if(!digitalRead(SW) && !SW_STATUS) {
Rotary_counter = 0;
tone(Buzzer, 500, 20);
if(Menu_row == 1){
Menu_level = 2;
Menu_row = 1;
}
else if(Menu_row == 2){
Menu_level = 3;
Menu_row = 1;
}
else if(Menu_row == 3){
Menu_level = 4;
Menu_row = 1;
}
SW_STATUS = true;
}
if(digitalRead(SW) && SW_STATUS)
{
SW_STATUS = false;
}
if (Rotary_counter <= 4)
{
Menu_row = 1;
}
else if (Rotary_counter > 4 && Rotary_counter <= 8)
{
Menu_row = 2;
}
else if (Rotary_counter > 8 && Rotary_counter <= 12)
{
Menu_row = 3;
}
if(Rotary_counter < 0)
{
Rotary_counter = 0;
}
if(Rotary_counter > 12)
{
Rotary_counter = 12;
}
currentMillis = millis();
if(currentMillis - previousMillis >= Delay){
previousMillis += Delay;
if(Menu_row == 1)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.write(0);
lcd.print(" Cnt Load");
lcd.setCursor(0,1);
lcd.print(" Cnt Current");
}
else if(Menu_row == 2)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Cnt Load");
lcd.setCursor(0,1);
lcd.write(0);
lcd.print(" Cnt Current");
}
else if(Menu_row == 3)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.write(0);
lcd.print(" Cnt Power");
}
}
}
if(Menu_level == 2)
{
if(Rotary_counter < 0)
{
Rotary_counter = 0;
}
if(Rotary_counter > 9)
{
Rotary_counter = 9;
}
if(!digitalRead(SW) && !SW_STATUS)
{
tone(Buzzer, 500, 20);
push_count_ON = push_count_ON + 1;
push_count_OFF = 0;
if(push_count_ON > 20)
{
Menu_row = Menu_row + 1;
if(Menu_row > 7)
{
Menu_level = 5;
pause = false;
ohm_setpoint = Ohms_0*1000000 + Ohms_1*100000 + Ohms_2*10000 + Ohms_3*1000 + Ohms_4*100 + Ohms_5*10 + Ohms_6;
}
Rotary_counter = 0;
SW_STATUS = true;
space_string = space_string + "_";
push_count_ON = 0;
}
}
if(digitalRead(SW) && SW_STATUS)
{
push_count_ON = 0;
push_count_OFF = push_count_OFF + 1;
if(push_count_OFF > 20){
SW_STATUS = false;
push_count_OFF = 0;
}
}
if(Menu_row == 1)
{
Ohms_0 = Rotary_counter;
}
if(Menu_row == 2)
{
Ohms_1 = Rotary_counter;
}
if(Menu_row == 3)
{
Ohms_2 = Rotary_counter;
}
if(Menu_row == 4)
{
Ohms_3 = Rotary_counter;
}
if(Menu_row == 5)
{
Ohms_4 = Rotary_counter;
}
if(Menu_row == 6)
{
Ohms_5 = Rotary_counter;
}
if(Menu_row == 7)
{
Ohms_6 = Rotary_counter;
}
currentMillis = millis();
if(currentMillis - previousMillis >= Delay){
previousMillis += Delay;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Ohms: ");
lcd.print(Ohms_0);
lcd.print(Ohms_1);
lcd.print(Ohms_2);
lcd.print(Ohms_3);
lcd.print(Ohms_4);
lcd.print(Ohms_5);
lcd.print(Ohms_6);
lcd.setCursor(0,1);
lcd.print(space_string);
lcd.write(2);
}
if(!digitalRead(SW_blue)){
Menu_level = 1;
Menu_row = 1;
Rotary_counter = 0;
Rotary_counter_prev = 0;
dac.setVoltage(0, false);
previousMillis = millis();
SW_STATUS = true;
space_string = "______";
ohm_setpoint = 0;
Ohms_1 = 0;
Ohms_2 = 0;
Ohms_3 = 0;
Ohms_4 = 0;
Ohms_5 = 0;
Ohms_6 = 0;
}
if(!digitalRead(SW_blue)){
Menu_level = 1;
Menu_row = 1;
Rotary_counter = 0;
Rotary_counter_prev = 0;
dac.setVoltage(0, false);
previousMillis = millis();
SW_STATUS = true;
space_string = "______";
ohm_setpoint = 0;
Ohms_1 = 0;
Ohms_2 = 0;
Ohms_3 = 0;
Ohms_4 = 0;
Ohms_5 = 0;
Ohms_6 = 0;
}
}
if(Menu_level == 3)
{
if(Rotary_counter < 0)
{
Rotary_counter = 0;
}
if(Rotary_counter > 9)
{
Rotary_counter = 9;
}
if(!digitalRead(SW) && !SW_STATUS)
{
tone(Buzzer, 500, 20);
push_count_ON = push_count_ON + 1;
push_count_OFF = 0;
if(push_count_ON > 20)
{
Menu_row = Menu_row + 1;
if(Menu_row > 4)
{
Menu_level = 6;
pause = false;
mA_setpoint = mA_0*1000 + mA_1*100 + mA_2*10 + mA_3;
}
Rotary_counter = 0;
SW_STATUS = true;
space_string_mA = space_string_mA + "_";
push_count_ON = 0;
}
}
if(digitalRead(SW) && SW_STATUS)
{
push_count_ON = 0;
push_count_OFF = push_count_OFF + 1;
if(push_count_OFF > 20){
SW_STATUS = false;
push_count_OFF = 0;
}
}
if(Menu_row == 1)
{
mA_0 = Rotary_counter;
}
if(Menu_row == 2)
{
mA_1 = Rotary_counter;
}
if(Menu_row == 3)
{
mA_2 = Rotary_counter;
}
if(Menu_row == 4)
{
mA_3 = Rotary_counter;
}
currentMillis = millis();
if(currentMillis - previousMillis >= Delay){
previousMillis += Delay;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("mA: ");
lcd.print(mA_0);
lcd.print(mA_1);
lcd.print(mA_2);
lcd.print(mA_3);
lcd.setCursor(0,1);
lcd.print(space_string_mA);
lcd.write(2);
}
if(!digitalRead(SW_blue)){
Menu_level = 1;
Menu_row = 1;
Rotary_counter = 0;
Rotary_counter_prev = 0;
dac.setVoltage(0, false);
previousMillis = millis();
SW_STATUS = true;
space_string_mA = "____";
mA_setpoint = 0;
mA_0 = 0;
mA_1 = 0;
mA_2 = 0;
}
}
if(Menu_level == 4)
{
if(Rotary_counter < 0)
{
Rotary_counter = 0;
}
if(Rotary_counter > 9)
{
Rotary_counter = 9;
}
if(!digitalRead(SW) && !SW_STATUS)
{
tone(Buzzer, 500, 20);
push_count_ON = push_count_ON + 1;
push_count_OFF = 0;
if(push_count_ON > 20)
{
Menu_row = Menu_row + 1;
if(Menu_row > 5)
{
Menu_level = 7;
pause = false;
mW_setpoint = mW_0*10000 + mW_1*1000 + mW_2*100 + mW_3*10 + mW_4;
}
Rotary_counter = 0;
SW_STATUS = true;
space_string_mA = space_string_mA + "_";
push_count_ON = 0;
}
}
if(digitalRead(SW) && SW_STATUS)
{
push_count_ON = 0;
push_count_OFF = push_count_OFF + 1;
if(push_count_OFF > 20){
SW_STATUS = false;
push_count_OFF = 0;
}
}
if(Menu_row == 1)
{
mW_0 = Rotary_counter;
}
if(Menu_row == 2)
{
mW_1 = Rotary_counter;
}
if(Menu_row == 3)
{
mW_2 = Rotary_counter;
}
if(Menu_row == 4)
{
mW_3 = Rotary_counter;
}
if(Menu_row == 5)
{
mW_4 = Rotary_counter;
}
currentMillis = millis();
if(currentMillis - previousMillis >= Delay){
previousMillis += Delay;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("mW: ");
lcd.print(mW_0);
lcd.print(mW_1);
lcd.print(mW_2);
lcd.print(mW_3);
lcd.print(mW_4);
lcd.setCursor(0,1);
lcd.print(space_string_mA);
lcd.write(2);
}
if(!digitalRead(SW_blue)){
Menu_level = 1;
Menu_row = 1;
Rotary_counter = 0;
Rotary_counter_prev = 0;
dac.setVoltage(0, false);
previousMillis = millis();
SW_STATUS = true;
space_string_mA = "____";
mW_setpoint = 0;
mW_0 = 0;
mW_1 = 0;
mW_2 = 0;
mW_3 = 0;
mW_4 = 0;
}
}
//Constant Load Mode
if(Menu_level == 5)
{
if(Rotary_counter > Rotary_counter_prev)
{
ohm_setpoint = ohm_setpoint + 1;
Rotary_counter_prev = Rotary_counter;
}
if(Rotary_counter < Rotary_counter_prev)
{
ohm_setpoint = ohm_setpoint - 1;
Rotary_counter_prev = Rotary_counter;
}
float voltage_on_load, sensosed_voltage, voltage_read, power_read;
voltage_on_load = ads.readADC_Differential_0_1(); //Read DIFFERENTIAL voltage between ADC0 and ADC1. (the load is 1ohm, so this is equal to the current)
voltage_on_load = (voltage_on_load * multiplier)*1000;
voltage_read = ads.readADC_SingleEnded(2);
voltage_read = (voltage_read * multiplier_A2);
//sensosed_voltage = ads.readADC_SingleEnded(3);
//sensosed_voltage = (sensosed_voltage * multiplier);
power_read = voltage_on_load * voltage_read;
float setpoint_current = (voltage_read / ohm_setpoint) * 1000;
float error = abs(setpoint_current - voltage_on_load);
if (error > (setpoint_current*0.8))
{
if(setpoint_current > voltage_on_load){
dac_value = dac_value + 300;
}
if(setpoint_current < voltage_on_load){
dac_value = dac_value - 300;
}
}
else if (error > (setpoint_current*0.6))
{
if(setpoint_current > voltage_on_load){
dac_value = dac_value + 170;
}
if(setpoint_current < voltage_on_load){
dac_value = dac_value - 170;
}
}
else if (error > (setpoint_current*0.4))
{
if(setpoint_current > voltage_on_load){
dac_value = dac_value + 120;
}
if(setpoint_current < voltage_on_load){
dac_value = dac_value - 120;
}
}
else if (error > (setpoint_current*0.3))
{
if(setpoint_current > voltage_on_load){
dac_value = dac_value + 60;
}
if(setpoint_current < voltage_on_load){
dac_value = dac_value - 60;
}
}
else if (error > (setpoint_current*0.2))
{
if(setpoint_current > voltage_on_load){
dac_value = dac_value + 40;
}
if(setpoint_current < voltage_on_load){
dac_value = dac_value - 40;
}
}
else if (error > (setpoint_current*0.1))
{
if(setpoint_current > voltage_on_load){
dac_value = dac_value + 30;
}
if(setpoint_current < voltage_on_load){
dac_value = dac_value - 30;
}
}
else
{
if(setpoint_current > voltage_on_load){
dac_value = dac_value + 1;
}
if(setpoint_current < voltage_on_load){
dac_value = dac_value - 1;
}
}
if(dac_value > 4095)
{
dac_value = 4095;
}
if(!pause){
dac.setVoltage(dac_value, false);
pause_string = "";
}
else{
dac.setVoltage(0, false);
pause_string = " PAUSE";
}
currentMillis = millis();
if(currentMillis - previousMillis >= Delay){
previousMillis += Delay;
lcd.clear();
lcd.setCursor(0,0);
lcd.print(ohm_setpoint,0); lcd.write(1); lcd.print(" "); lcd.print(voltage_read,3); lcd.print("V");
lcd.setCursor(0,1);
lcd.print(voltage_on_load,0); lcd.print("mA"); lcd.print(" "); lcd.print(power_read,0); lcd.print("mW");
lcd.print(pause_string);
}
if(!digitalRead(SW_blue)){
Menu_level = 1;
Menu_row = 1;
Rotary_counter = 0;
Rotary_counter_prev = 0;
dac.setVoltage(0, false);
previousMillis = millis();
SW_STATUS = true;
space_string = "______";
ohm_setpoint = 0;
Ohms_1 = 0;
Ohms_2 = 0;
Ohms_3 = 0;
Ohms_4 = 0;
Ohms_5 = 0;
Ohms_6 = 0;
}
}
//Constant Current Mode
if(Menu_level == 6)
{
if(Rotary_counter > Rotary_counter_prev)
{
mA_setpoint = mA_setpoint + 1;
Rotary_counter_prev = Rotary_counter;
}
if(Rotary_counter < Rotary_counter_prev)
{
mA_setpoint = mA_setpoint - 1;
Rotary_counter_prev = Rotary_counter;
}
float voltage_on_load, sensosed_voltage, voltage_read, power_read;
voltage_on_load = ads.readADC_Differential_0_1(); //Read DIFFERENTIAL voltage between ADC0 and ADC1
voltage_on_load = (voltage_on_load * multiplier)*1000;
voltage_read = ads.readADC_SingleEnded(2);
voltage_read = (voltage_read * multiplier_A2);
//sensosed_voltage = ads.readADC_SingleEnded(3);
//sensosed_voltage = (sensosed_voltage * multiplier);
power_read = voltage_on_load * voltage_read;
float error = abs(mA_setpoint - voltage_on_load);
if (error > (mA_setpoint*0.8))
{
if(mA_setpoint > voltage_on_load){
dac_value = dac_value + 300;
}
if(mA_setpoint < voltage_on_load){
dac_value = dac_value - 300;
}
}
else if (error > (mA_setpoint*0.6))
{
if(mA_setpoint > voltage_on_load){
dac_value = dac_value + 170;
}
if(mA_setpoint < voltage_on_load){
dac_value = dac_value - 170;
}
}
else if (error > (mA_setpoint*0.4))
{
if(mA_setpoint > voltage_on_load){
dac_value = dac_value + 120;
}
if(mA_setpoint < voltage_on_load){
dac_value = dac_value - 120;
}
}
else if (error > (mA_setpoint*0.3))
{
if(mA_setpoint > voltage_on_load){
dac_value = dac_value + 60;
}
if(mA_setpoint < voltage_on_load){
dac_value = dac_value - 60;
}
}
else if (error > (mA_setpoint*0.2))
{
if(mA_setpoint > voltage_on_load){
dac_value = dac_value + 40;
}
if(mA_setpoint < voltage_on_load){
dac_value = dac_value - 40;
}
}
else if (error > (mA_setpoint*0.1))
{
if(mA_setpoint > voltage_on_load){
dac_value = dac_value + 30;
}
if(mA_setpoint < voltage_on_load){
dac_value = dac_value - 30;
}
}
else
{
if(mA_setpoint > voltage_on_load){
dac_value = dac_value + 1;
}
if(mA_setpoint < voltage_on_load){
dac_value = dac_value - 1;
}
}
if(dac_value > 4095)
{
dac_value = 4095;
}
if(!pause){
dac.setVoltage(dac_value, false);
pause_string = "";
}
else{
dac.setVoltage(0, false);
pause_string = " PAUSE";
}
currentMillis = millis();
if(currentMillis - previousMillis >= Delay){
previousMillis += Delay;
lcd.clear();
lcd.setCursor(0,0);
lcd.print(mA_setpoint,0); lcd.print("mA "); lcd.print(voltage_read); lcd.print("V");
lcd.setCursor(0,1);
lcd.print(voltage_on_load,0); lcd.print("mA"); lcd.print(" "); lcd.print(power_read,0); lcd.print("mW");
lcd.print(pause_string);
}
if(!digitalRead(SW_blue)){
Menu_level = 1;
Menu_row = 1;
Rotary_counter = 0;
Rotary_counter_prev = 0;
dac.setVoltage(0, false);
previousMillis = millis();
SW_STATUS = true;
space_string_mA = "____";
mA_setpoint = 0;
mA_0 = 0;
mA_1 = 0;
mA_2 = 0;
}
}
//Constant Power Mode
if(Menu_level == 7)
{
if(Rotary_counter > Rotary_counter_prev)
{
mW_setpoint = mW_setpoint + 1;
Rotary_counter_prev = Rotary_counter;
}
if(Rotary_counter < Rotary_counter_prev)
{
mW_setpoint = mW_setpoint - 1;
Rotary_counter_prev = Rotary_counter;
}
float voltage_on_load, sensosed_voltage, voltage_read, power_read;
voltage_on_load = ads.readADC_Differential_0_1(); //Read DIFFERENTIAL voltage between ADC0 and ADC1
voltage_on_load = (voltage_on_load * multiplier)*1000;
voltage_read = ads.readADC_SingleEnded(2);
voltage_read = (voltage_read * multiplier_A2);
//sensosed_voltage = ads.readADC_SingleEnded(3);
//sensosed_voltage = (sensosed_voltage * multiplier);
power_read = voltage_on_load * voltage_read;
float error = abs(mW_setpoint - power_read);
if (error > (mW_setpoint*0.8))
{
if(mW_setpoint > power_read){
dac_value = dac_value + 300;
}
if(mW_setpoint < power_read){
dac_value = dac_value - 300;
}
}
else if (error > (mW_setpoint*0.6))
{
if(mW_setpoint > power_read){
dac_value = dac_value + 170;
}
if(mW_setpoint < power_read){
dac_value = dac_value - 170;
}
}
else if (error > (mW_setpoint*0.4))
{
if(mW_setpoint > power_read){
dac_value = dac_value + 120;
}
if(mW_setpoint < power_read){
dac_value = dac_value - 120;
}
}
else if (error > (mW_setpoint*0.3))
{
if(mW_setpoint > power_read){
dac_value = dac_value + 60;
}
if(mW_setpoint < power_read){
dac_value = dac_value - 60;
}
}
else if (error > (mW_setpoint*0.2))
{
if(mW_setpoint > power_read){
dac_value = dac_value + 40;
}
if(mW_setpoint < power_read){
dac_value = dac_value - 40;
}
}
else if (error > (mW_setpoint*0.1))
{
if(mW_setpoint > power_read){
dac_value = dac_value + 30;
}
if(mW_setpoint < power_read){
dac_value = dac_value - 30;
}
}
else
{
if(mW_setpoint > power_read){
dac_value = dac_value + 1;
}
if(mW_setpoint < power_read){
dac_value = dac_value - 1;
}
}
if(dac_value > 4095)
{
dac_value = 4095;
}
if(!pause){
dac.setVoltage(dac_value, false);
pause_string = "";
}
else{
dac.setVoltage(0, false);
pause_string = " PAUSE";
}
currentMillis = millis();
if(currentMillis - previousMillis >= Delay){
previousMillis += Delay;
lcd.clear();
lcd.setCursor(0,0);
lcd.print(mW_setpoint,0); lcd.print("mW "); lcd.print(voltage_read); lcd.print("V");
lcd.setCursor(0,1);
lcd.print(power_read,0); lcd.print("mW"); lcd.print(" "); lcd.print(voltage_on_load,0); lcd.print("mA");
lcd.print(pause_string);
}
if(!digitalRead(SW_blue)){
Menu_level = 1;
Menu_row = 1;
Rotary_counter = 0;
Rotary_counter_prev = 0;
dac.setVoltage(0, false);
previousMillis = millis();
SW_STATUS = true;
space_string_mA = "____";
mW_setpoint = 0;
mW_0 = 0;
mW_1 = 0;
mW_2 = 0;
mW_3 = 0;
mW_4 = 0;
}
}
}//end void loop
ISR(PCINT0_vect){
cli(); //stop interrupts happening before we read pin values
clk_State = (PINB & B00000100); //pin 10 state?
dt_State = (PINB & B00000010);
if (clk_State != Last_State){
// If the outputB state is different to the outputA state, that means the encoder is rotating clockwise
if (dt_State != clk_State){
Rotary_counter ++;
tone(Buzzer, 700, 5);
Last_State = clk_State; // Updates the previous state of the outputA with the current state
sei(); //restart interrupts
}
else {
Rotary_counter --;
tone(Buzzer, 700, 5);
Last_State = clk_State; // Updates the previous state of the outputA with the current state
sei(); //restart interrupts
}
}
}