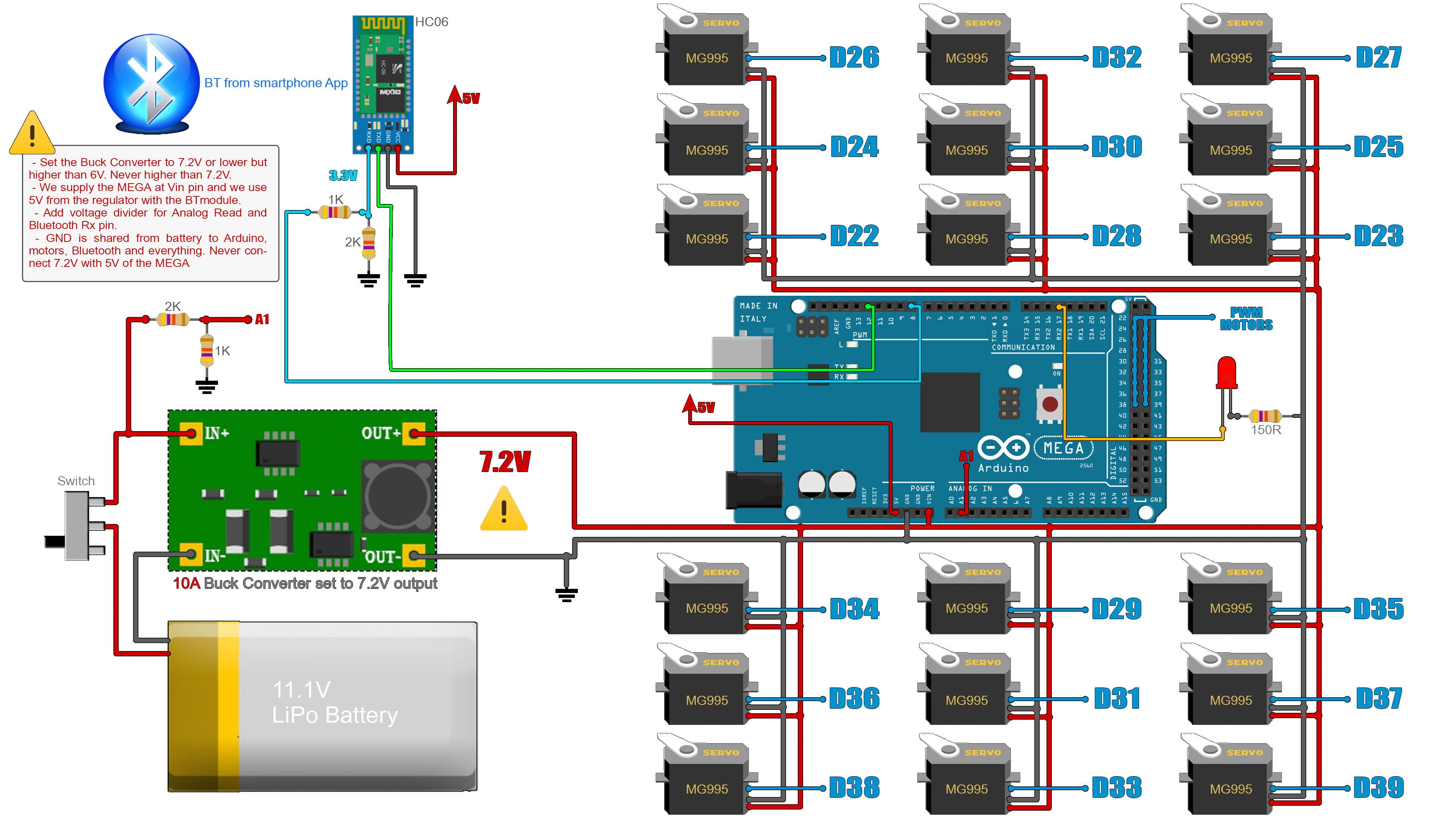
The connections are very simple but we have a lot. First connect positive pin of the battery to the swithc. From the swithc and battery we connect to the buck converter input. Set the converter to 7.2V. This 7.2V will then be connected to all servo motors and to the Vin pin of the Arduino MEGA. Share GND. Connect the Bluetooth module and remember to add a voltage divider to the RX pin to lower the voltage to 3.3V. Connect the PWM pins from the MEGA to each servo motor as below. Also add the battery indicator LED and the battery read voltage divider and connec it to analog input A1.